Overview
Led the complete development of an intelligent chess-playing robotic arm, from initial CAD design to final automation. This open-source project combines mechanical engineering, computer vision, and AI to create a robot capable of playing chess against human opponents with high accuracy.
Key Achievements
- 🎯 Achieved 85% chess piece classification accuracy
- 🤖 Complete pipeline from CAD to working prototype
- 👁️ Integrated Intel RealSense D435i for 3D perception
- 🎓 Demonstrated to school children during Spark Week
- 🔄 Transitioned to SO-100 arm for VLM integration
Technical Implementation
Development Pipeline
Managed the complete development process including CAD design in Fusion 360, simulation in ROS/Gazebo, 3D printing of custom parts, assembly of mechanical and electronic components, and software automation for chess gameplay.
Computer Vision System
- Intel RealSense D435i stereo camera for depth perception
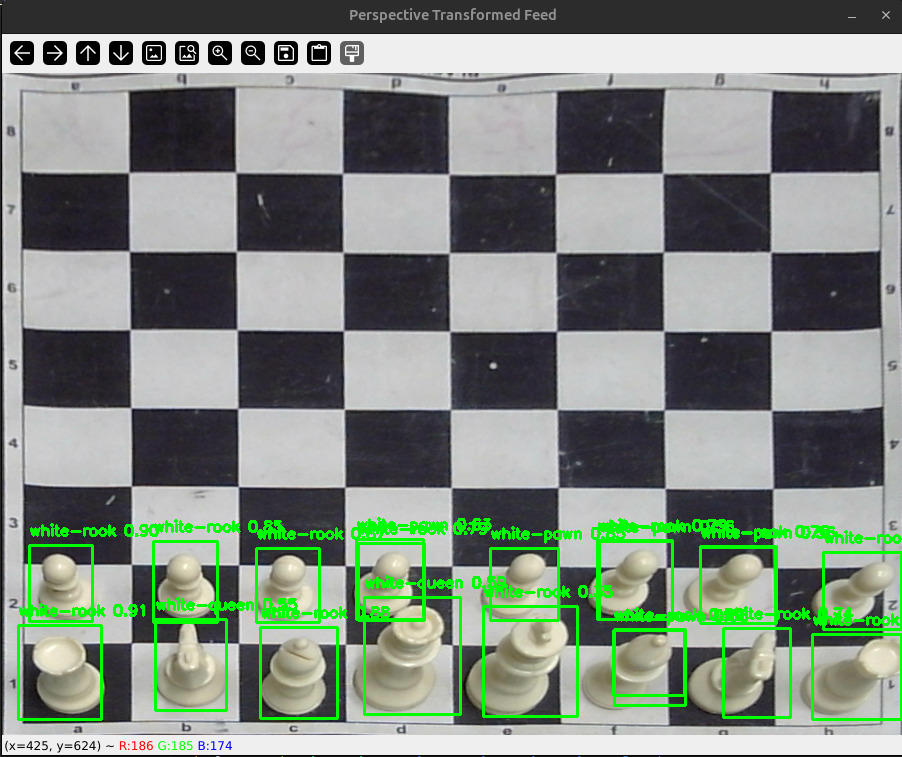
- Custom image processing pipeline using OpenCV
- Perspective transformation and thresholding techniques
- Real-time board state recognition
Chess Piece Recognition
Fine-tuned YOLOv8 model on a combined dataset of real and synthetic chess images. Implemented data augmentation techniques to improve model robustness, achieving around 85% accuracy in piece classification under varying lighting conditions.
Evolution to SO-100
Transitioned from the heavy-duty 6-DOF arm to the more agile SO-100 arm to enable Vision-Language Model (VLM) integration and reinforcement learning research, opening new possibilities for intelligent robotic manipulation.
.jpeg)